



4. Kern sagteware funksies van BMS
l Meetfunksie
(1) Basiese inligtingmeting: monitering van batteryspanning, stroomsein en batterypaktemperatuur. Die mees basiese funksie van die batterybestuurstelsel is om die spanning, stroom en temperatuur van batteryselle te meet, wat die basis vorm van alle topvlakberekeninge en beheerlogika van die batterybestuurstelsel.
(2) Opsporing van isolasieweerstand: Die hele batterystelsel en hoëspanningstelsel moet deur die batterybestuurstelsel vir isolasie getoets word.
(3) Hoëspanning-interlock-opsporing (HVIL): word gebruik om die integriteit van die hele hoëspanningstelsel te bevestig. Wanneer die integriteit van die hoëspanningstelselkring beskadig is, word veiligheidsmaatreëls geaktiveer.
lSkattingsfunksie
(1) SOC- en SOH-beraming: die kern- en moeilikste deel
(2) Balansering: pas die SOC x kapasiteitswanbalans tussen monomere aan deur 'n balanseringskring.
(3) Batterykragbeperking: die inset- en uitsetkrag van die battery word beperk by verskillende SOC-temperature.
lAnder funksies
(1) Relaisbeheer: insluitend hoof +, hoof-, laairelais +, laairelais -, voorlaairelais
(2) Termiese beheer
(3) Kommunikasiefunksie
(4) Foutdiagnose en alarm
(5) Foutverdraagsame werking
5.Kern sagteware funksies van BMS
lMeetfunksie
(1) Basiese inligtingmeting: monitering van batteryspanning, stroomsein en batterypaktemperatuur. Die mees basiese funksie van die batterybestuurstelsel is om die spanning, stroom en temperatuur van batteryselle te meet, wat die basis vorm van alle topvlakberekeninge en beheerlogika van die batterybestuurstelsel.
(2) Opsporing van isolasieweerstand: Die hele batterystelsel en hoëspanningstelsel moet deur die batterybestuurstelsel vir isolasie getoets word.
(3) Hoëspanning-interlock-opsporing (HVIL): word gebruik om die integriteit van die hele hoëspanningstelsel te bevestig. Wanneer die integriteit van die hoëspanningstelselkring beskadig is, word veiligheidsmaatreëls geaktiveer.
lSkattingsfunksie
(1) SOC- en SOH-beraming: die kern- en moeilikste deel
(2) Balansering: pas die SOC x kapasiteitswanbalans tussen monomere aan deur 'n balanseringskring.
(3) Batterykragbeperking: die inset- en uitsetkrag van die battery word beperk by verskillende SOC-temperature.
lAnder funksies
(1) Relaisbeheer: insluitend hoof +, hoof-, laairelais +, laairelais -, voorlaairelais
(2) Termiese beheer
(3) Kommunikasiefunksie
(4) Foutdiagnose en alarm
(5) Foutverdraagsame werking
6.BMS sagteware-argitektuur
lHoë- en laespanningsbestuur
Wanneer dit normaalweg aangeskakel is, word die BMS deur die VCU wakker gemaak via 'n harde lyn of KAN-sein van 12V. Nadat die BMS selftoets voltooi het en in bystand gaan, stuur die VCU 'n hoëspanningsopdrag, en die BMS beheer die sluiting van die relais om die hoëspanningverbinding te voltooi. Wanneer dit afgeskakel is, stuur die VCU 'n laespanningsopdrag en ontkoppel dan die 12V-wakkerwording. Wanneer die geweer in die af-toestand vir laai geplaas word, kan dit deur die CP- of A+-sein wakker gemaak word.
lLaaibestuur
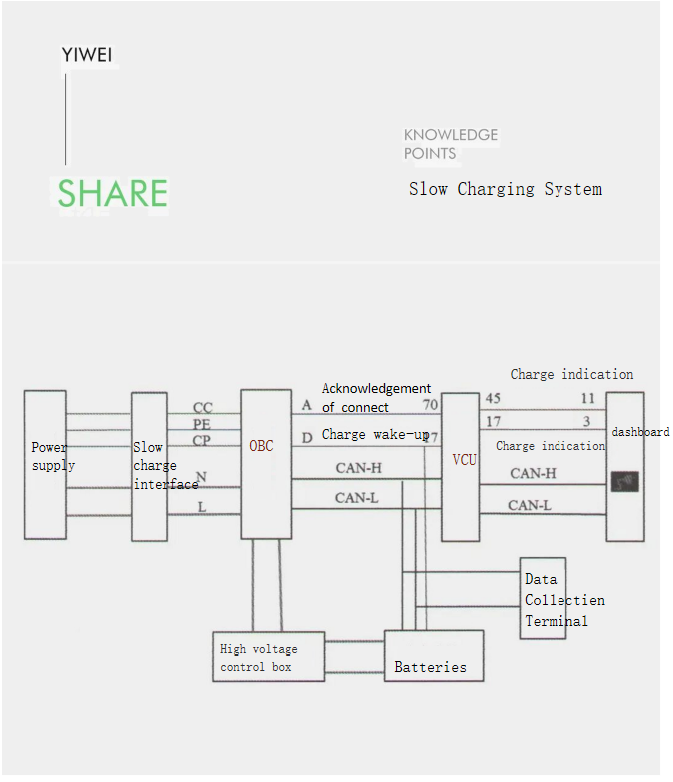
(1) Stadige laai
Stadige laai is om die battery te laai met gelykstroom wat omgeskakel word van wisselstroom deur die ingeboude laaier van die laaipaal (of 220V-kragtoevoer). Die laaipaalspesifikasies is gewoonlik 16A, 32A en 64A, en dit kan ook deur 'n huishoudelike kragtoevoer gelaai word. Die BMS kan deur die CC- of CP-sein wakker gemaak word, maar daar moet verseker word dat dit normaal kan slaap nadat die laai voltooi is. Die WS-laaiproses is relatief eenvoudig en kan ontwikkel word in ooreenstemming met gedetailleerde nasionale standaarde.
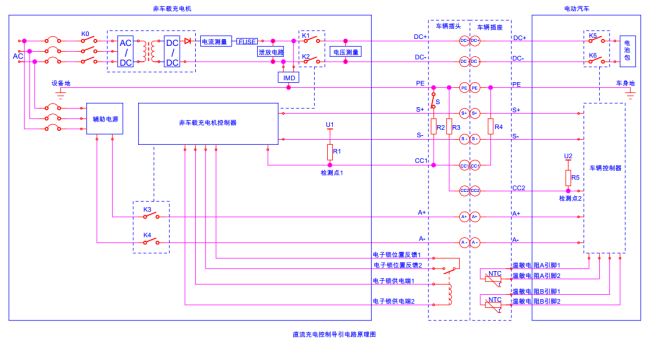
(2) Vinnige laai
Vinnige laai is om die battery met gelykstroomuitset deur die GS-laaipaal te laai, wat 'n laaispoed van 1C of selfs hoër kan bereik. Oor die algemeen kan 80% van die battery binne 45 minute gelaai word. Dit kan geaktiveer word deur die hulpkragbron A+ sein van die laaipaal.
lSkattingsfunksie
(1) SOP (State of Power) verkry hoofsaaklik die huidige battery se beskikbare laai- en ontlaaikrag deur tabelle op te soek deur temperatuur en SOC. Die VCU bepaal hoe die hele voertuig gebruik word gebaseer op die kragwaarde wat gestuur word.
(2) SOH (State of Health) karakteriseer hoofsaaklik die huidige gesondheidstatus van die battery, met 'n waarde tussen 0-100%. Daar word algemeen aanvaar dat die battery nie gebruik kan word nadat dit onder 80% gedaal het nie.
(3) SOC (State of Charge) behoort tot die kernbeheeralgoritme van die BMS, wat die huidige oorblywende kapasiteitstatus karakteriseer. Dit is hoofsaaklik gebaseer op die ampère-uur-integraalmetode en die EKF (uitgebreide Kalman-filter) algoritme, gekombineer met korreksiestrategieë (soos oopkringspanningskorreksie, volle ladingkorreksie, einde-van-ladingkorreksie, kapasiteitskorreksie onder verskillende temperature en SOH, ens.).
(4) Die SOE (State of Energy) algoritme word nie wyd ontwikkel deur plaaslike vervaardigers nie, of gebruik relatief eenvoudige algoritmes om die verhouding van die oorblywende energie onder die huidige toestand tot die maksimum beskikbare energie te verkry. Hierdie funksie word hoofsaaklik gebruik om die oorblywende kruisafstand te skat.
lFoutdiagnose
Verskillende foutvlakke word onderskei volgens die verskillende werkverrigting van die battery, en verskillende verwerkingsmaatreëls word deur die BMS en VCU onder verskillende foutvlakke geneem, soos waarskuwings, kragbeperking of direkte ontkoppeling van hoë spanning. Foute sluit in data-insamelings- en rasionaliteitsfoute, elektriese foute (sensors en aktuators), kommunikasiefoute en batterystatusfoute, ens.
1.Kern sagteware funksies van BMS
lMeetfunksie
(1) Basiese inligtingmeting: monitering van batteryspanning, stroomsein en batterypaktemperatuur. Die mees basiese funksie van die batterybestuurstelsel is om die spanning, stroom en temperatuur van batteryselle te meet, wat die basis vorm van alle topvlakberekeninge en beheerlogika van die batterybestuurstelsel.
(2) Opsporing van isolasieweerstand: Die hele batterystelsel en hoëspanningstelsel moet deur die batterybestuurstelsel vir isolasie getoets word.
(3) Hoëspanning-interlock-opsporing (HVIL): word gebruik om die integriteit van die hele hoëspanningstelsel te bevestig. Wanneer die integriteit van die hoëspanningstelselkring beskadig is, word veiligheidsmaatreëls geaktiveer.
lSkattingsfunksie
(1) SOC- en SOH-beraming: die kern- en moeilikste deel
(2) Balansering: pas die SOC x kapasiteitswanbalans tussen monomere aan deur 'n balanseringskring.
(3) Batterykragbeperking: die inset- en uitsetkrag van die battery word beperk by verskillende SOC-temperature.
lAnder funksies
(1) Relaisbeheer: insluitend hoof +, hoof-, laairelais +, laairelais -, voorlaairelais
(2) Termiese beheer
(3) Kommunikasiefunksie
(4) Foutdiagnose en alarm
(5) Foutverdraagsame werking
2.BMS sagteware-argitektuur
lHoë- en laespanningsbestuur
Wanneer dit normaalweg aangeskakel is, word die BMS deur die VCU wakker gemaak via 'n harde lyn of KAN-sein van 12V. Nadat die BMS selftoets voltooi het en in bystand gaan, stuur die VCU 'n hoëspanningsopdrag, en die BMS beheer die sluiting van die relais om die hoëspanningverbinding te voltooi. Wanneer dit afgeskakel is, stuur die VCU 'n laespanningsopdrag en ontkoppel dan die 12V-wakkerwording. Wanneer die geweer in die af-toestand vir laai geplaas word, kan dit deur die CP- of A+-sein wakker gemaak word.
lLaaibestuur
(1) Stadige laai
Stadige laai is om die battery te laai met gelykstroom wat omgeskakel word van wisselstroom deur die ingeboude laaier van die laaipaal (of 220V-kragtoevoer). Die laaipaalspesifikasies is gewoonlik 16A, 32A en 64A, en dit kan ook deur 'n huishoudelike kragtoevoer gelaai word. Die BMS kan deur die CC- of CP-sein wakker gemaak word, maar daar moet verseker word dat dit normaal kan slaap nadat die laai voltooi is. Die WS-laaiproses is relatief eenvoudig en kan ontwikkel word in ooreenstemming met gedetailleerde nasionale standaarde.
(2) Vinnige laai
Vinnige laai is om die battery met gelykstroomuitset deur die GS-laaipaal te laai, wat 'n laaispoed van 1C of selfs hoër kan bereik. Oor die algemeen kan 80% van die battery binne 45 minute gelaai word. Dit kan geaktiveer word deur die hulpkragbron A+ sein van die laaipaal.
lSkattingsfunksie
(1) SOP (State of Power) verkry hoofsaaklik die huidige battery se beskikbare laai- en ontlaaikrag deur tabelle op te soek deur temperatuur en SOC. Die VCU bepaal hoe die hele voertuig gebruik word gebaseer op die kragwaarde wat gestuur word.
(2) SOH (State of Health) karakteriseer hoofsaaklik die huidige gesondheidstatus van die battery, met 'n waarde tussen 0-100%. Daar word algemeen aanvaar dat die battery nie gebruik kan word nadat dit onder 80% gedaal het nie.
(3) SOC (State of Charge) behoort tot die kernbeheeralgoritme van die BMS, wat die huidige oorblywende kapasiteitstatus karakteriseer. Dit is hoofsaaklik gebaseer op die ampère-uur-integraalmetode en die EKF (uitgebreide Kalman-filter) algoritme, gekombineer met korreksiestrategieë (soos oopkringspanningskorreksie, volle ladingkorreksie, einde-van-ladingkorreksie, kapasiteitskorreksie onder verskillende temperature en SOH, ens.).
(4) Die SOE (State of Energy) algoritme word nie wyd ontwikkel deur plaaslike vervaardigers nie, of gebruik relatief eenvoudige algoritmes om die verhouding van die oorblywende energie onder die huidige toestand tot die maksimum beskikbare energie te verkry. Hierdie funksie word hoofsaaklik gebruik om die oorblywende kruisafstand te skat.
lFoutdiagnose
Verskillende foutvlakke word onderskei volgens die verskillende werkverrigting van die battery, en verskillende verwerkingsmaatreëls word deur die BMS en VCU onder verskillende foutvlakke geneem, soos waarskuwings, kragbeperking of direkte ontkoppeling van hoë spanning. Foute sluit in data-insamelings- en rasionaliteitsfoute, elektriese foute (sensors en aktuators), kommunikasiefoute en batterystatusfoute, ens.
Kontak ons:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
Plasingstyd: 12 Mei 2023



